Unreal Engine Backend
The Unreal Engine backend forms the foundation of SimWorld, providing high-fidelity rendering and physics simulation.
Various Scenes
SimWorld supports two scene-building modes: procedural generation and pre-built scenes.
The procedural generation module enables the creation of virtually unlimited city layouts populated with diverse buildings, roads, and street elements. This allows users to dynamically render coherent and realistic urban environments at runtime, making it ideal for large-scale experimentation under customizable conditions. See Procedural City Generation for details.
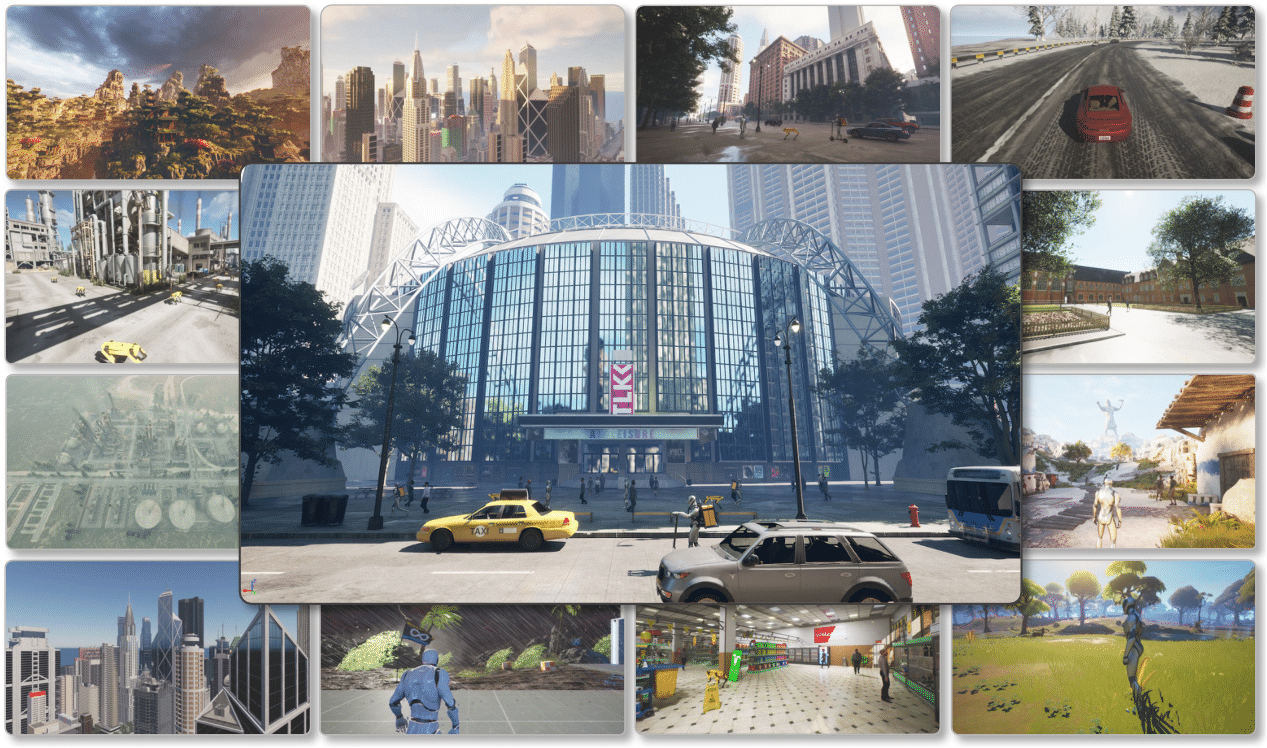
In addition to procedurally generated cities, SimWorld also provides a rich collection of pre-built maps (see Additional Environments). These manually designed scenes can be created by users or imported from external sources such as the Unreal Engine Marketplace. The current release includes 102 curated scenes spanning a wide range of visual and structural styles—such as ancient towns, natural landscapes, futuristic cities, and fictional worlds. Each map offers distinct visual cues, spatial layouts, and interaction dynamics, enabling diverse and comprehensive evaluation of embodied agents.
Assets
Our simulator provides a rich collection of city-scale assets, designed to support realistic and diverse urban simulations. These assets include buildings, trees, street furniture, vehicles, pedestrians, and robots. All assets are sourced from the Unreal Engine Marketplace to ensure high visual fidelity and performance.
In addition to the curated asset library, we also offer an Asset Generation Pipeline that enables users to create .uasset files directly from natural language descriptions. This tool streamlines the content creation process by converting user prompts into usable Unreal Engine assets, significantly lowering the barrier for customizing city environments.
Collected Assets
Below is a selection of the assets currently available in our simulator:
Buildings: A variety of architectural styles, including residential, commercial, and industrial structures.
Trees: Multiple tree species with seasonal variations to enhance environmental realism.
Street Furniture: Items such as benches, streetlights, boxes, and trash bins to add detail and immersion.
Vehicles: A range of vehicles including cars, buses, trucks, and scooters, each with accurate scale and animations.
Pedestrians: Human characters with diverse appearances and animations to simulate crowd behavior.
Robots: The detailed introduction of the robot can be found in SimWorld-Robotics.
These assets collectively enable the creation of complex, dynamic, and realistic city scenes for simulation, visualization, and research purposes.

Sensors

As illustrated in the figure above, SimWorld supports a variety of sensors, including RGB images, segmentation maps, and depth images, enabling a rich understanding of the surrounding environment.
How to get images
# viewmode can be 'lit', 'depth' and 'object_mask'
image = communicator.get_camera_observation(camera_id, viewmode) # Get camera image observation
# adjust camera
ucv.get_cameras() # Get list of all available cameras
ucv.get_camera_location(camera_id) # Get camera position (x, y, z)
ucv.get_camera_rotation(camera_id) # Get camera rotation (pitch, yaw, roll)
ucv.get_camera_fov(camera_id) # Get camera field of view
ucv.get_camera_resolution(camera_id) # Get camera resolution (width, height)
ucv.set_camera_location(camera_id, location) # Set camera position (location: tuple of x, y, z)
ucv.set_camera_rotation(camera_id, rotation) # Set camera rotation (rotation: tuple of pitch, yaw, roll)
ucv.set_camera_fov(camera_id, fov) # Set camera field of view (fov: float)
ucv.set_camera_resolution(camera_id, resolution) # Set camera resolution (resolution: tuple of width, height)
Related files: communicator.py, unrealcv.py.
Synchronous and Asynchronous mode
Our simulator supports both synchronous and asynchronous execution modes for communication between the Python client and the Unreal Engine (UE) server.
In synchronous mode, the Python client explicitly controls the simulation timing. At each step, it sends a tick command to the UE server and waits until the server completes the simulation update. This mode ensures deterministic behavior, which is especially important for reinforcement learning, multi-agent coordination, and evaluation tasks.
In asynchronous mode, the UE server runs continuously at its own frame rate, while the Python client retrieves data at any time. This allows for real-time interaction but can lead to non-determinism and race conditions in agent-environment interaction.
# Set simulation mode: choose between "sync" (synchronous) and "async" (asynchronous)
mode = "sync"
tick_interval = 0.05 # Duration of each simulation step in seconds (only used in sync mode)
ucv.set_mode(mode, tick_interval)
# Advance the simulation by one tick (tick_interval seconds)
ucv.tick()