Waypoint System
Overview

To enable robust agent navigation and path planning within the simulated environment, SimWorld incorporates a customizable waypoint system that serves as the foundational representation of navigable space. This system is initially constructed using a coarse-grained waypoint skeleton derived from the output of the Procedural City Generation pipeline. Specifically, the pipeline generates high-level geometric features of the environment, such as road centerlines and intersection points, which are then used to define the topological structure of the navigation graph.
Map
The Waypoint System is implemented as a Map class, where each waypoint is represented by a Node and each connection between waypoints is represented by an Edge.
class Node:
def __init__(self, position: Vector, direction: Vector, type: str = 'sidewalk'):
"""Initialize a Node.
Args:
position: Position vector of the node.
direction: Direction vector of the node.
type: Node type; 'sidewalk', 'crosswalk', or 'intersection'.
"""
self.position = position
self.direction = direction
self.type = type
class Edge:
def __init__(self, node1: Node, node2: Node):
"""Initialize an Edge.
Args:
node1: First endpoint.
node2: Second endpoint.
"""
self.node1 = node1
self.node2 = node2
self.weight = node1.position.distance(node2.position)
class Map:
def __init__(self, config: Config, traffic_signals: list = None):
"""Initialize an empty Map.
Args:
config: Configuration object containing map parameters.
traffic_signals: Optional list of traffic signals in the environment. Used when an agent needs to follow the traffic rules.
"""
self.nodes = set()
self.edges = set()
self.adjacency_list = defaultdict(list)
self.config = config
self.traffic_signals = traffic_signals
Granularity
The granularity of the waypoint system is customizable. Users can specify the number of waypoints and the distance between them.
To initialize a map:
map = Map(config)
map.initialize_map_from_file(roads_file, sidewalk_offset, fine_grained, num_waypoints_normal, waypoints_distance, waypoints_normal_distance)
roads_file: File generated from the Layout Generation pipeline.sidewalk_offset: Distance between the road centerline and sidewalk centerline.fine_grained: Whether to enable interpolation to build a fine-grained map.num_waypoints_normal: Number of waypoints in the normal direction of the sidewalk.waypoints_distance: Distance between waypoints along the sidewalk.waypoints_normal_distance: Number of waypoints in the normal direction.
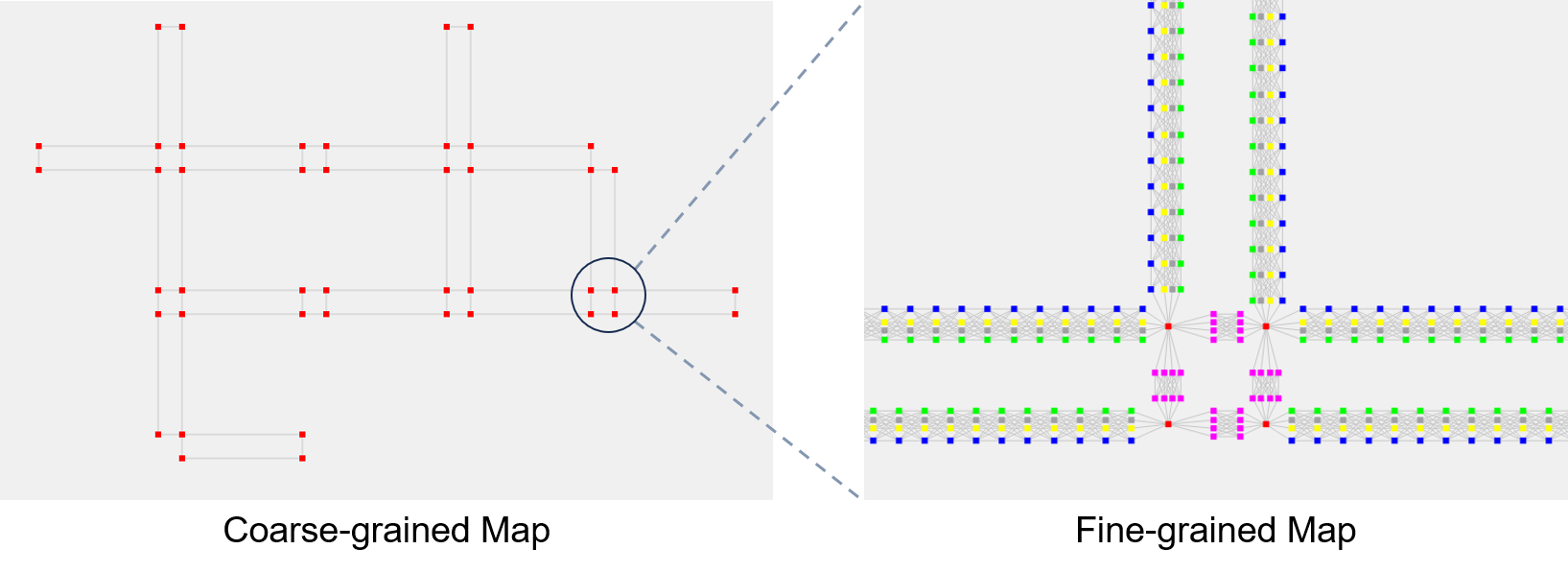
In a coarse-grained map, all nodes are labeled as intersection. In a fine-grained map, sidewalk and crosswalk nodes are interpolated between intersection nodes. Below is an example of coarse-grained and fine-grained maps.